
Università degli Studi di Pavia
Centro Interdisciplinare di Bioacustica e Ricerche Ambientali
Via Taramelli 24 - 27100 Pavia - Italye-mail : cibra@unipv.it
Equipment developed at CIBRA
The design and testing of original instruments and software for bioacoustic research is one of the most important and most appreciated CIBRA activities.
Digital Signal Processing Workstation
Before the establishement of the Centre in 1989, bioacoustic research was carried out within the research programs of the Institute of Entomology. Bioacoustic research began in 1980 with the developement of a computer based digital spectrograph. It was the first one in Italy dedicated to the study of animal vocalizations (DSPW History) and allowed the first experiments of digital analysis on animal sounds in Italy. Initially, it was mainly used for experimentation, bird song analysis and microseismic studies. In 1984 the first analyses on fish sounds opened the pathway to the development of new instruments and software for underwater bioacoustics, mainly on fishes and marine mammals.

The equipment developed in the period 1980-1983
required 45 minutes to produce a 1 second long
spectrogram.
Now everything works in real-time on a cheap laptop!
The system developed for signal acquisition and analysis is continuously evolving to meet the requirements of research, monitoring and conservation activities. The PAM (Passive Acoustic Monitoring) suite developed at CIBRA now includes software to assist in collecting ship information and georeferenced data for mitigation needs. Here the major development steps:
DSPW
History 1980-1990
DSPW version 1991-1996 (DOS
based)
DSPW version 1997-2005
(Windows based)
DSPW Sound Analysis
Software for PC systems
SeaPro and SeaWave software for Windows
systems (2005-now)
The current software version has the following features:
- Runs on Win 98/2K/NT/XP/Vista/7/8
- support for multiple high resolution displays
- multiple high resolution real-time spectrograms
- digital zooming into any frequency band (zoom max 16x)
- continuous hard disk recording (10min, 15min, 30min, 1 hour cuts, time and georeferenced)
- buffer recording (to save to disk the latest n minutes of sound, time and georeferenced)
- scheduled hard disk recording
- support for Dodotronic UltraMic200 (all Win versions)
and UltraMic250 (Win Vista,7,8)
The PAM suite also includes:
- Bearing display (two spaced hydrophones are required)
- Serial NMEA input and NMEA distribution over network (either wired or wireless)
- Remote control over network
- GPS data logging, file georeferencing
- event logging and grabbing of UDP data from the ship's network (if available)
- distributed processing of NMEA data and real-time GIS mapping
Features under development or testing:
- Audio stream over a network
- Automatic detection and recording of acoustic events
(SeaPro 3 - Beta testing)
- Real-time band shifting for making ultrasounds audible (SeaPro 3 - Beta testing
- Real-time bearing display of detected events
Devices supported:
- ISA / PCI sound boards
- USB & FireWire audio interfaces
- laptops’ built-in audio (an external USB interface is recommended)
- optical and electrical digital audio I/O
- up to 12 channels with 192k samples/sec with PCI/FireWire interfaces with standard Windows drivers
- support for Dodotronic UltraMic200 (all Win versions)
and UltraMic250 (Win Vista,7,8)
- up to 400k samples/sec with NIDAQ PCMCIA (SeaProDAQ -
now obsolete)
- up to 800k samples/sec with NI DAQ PCI/FireWire
interfaces (SeaProDAQ - now obsolete)
- sonobuoy radio-receiver, single channel, 20 kHz bw
Tablet DSPW and Navigation
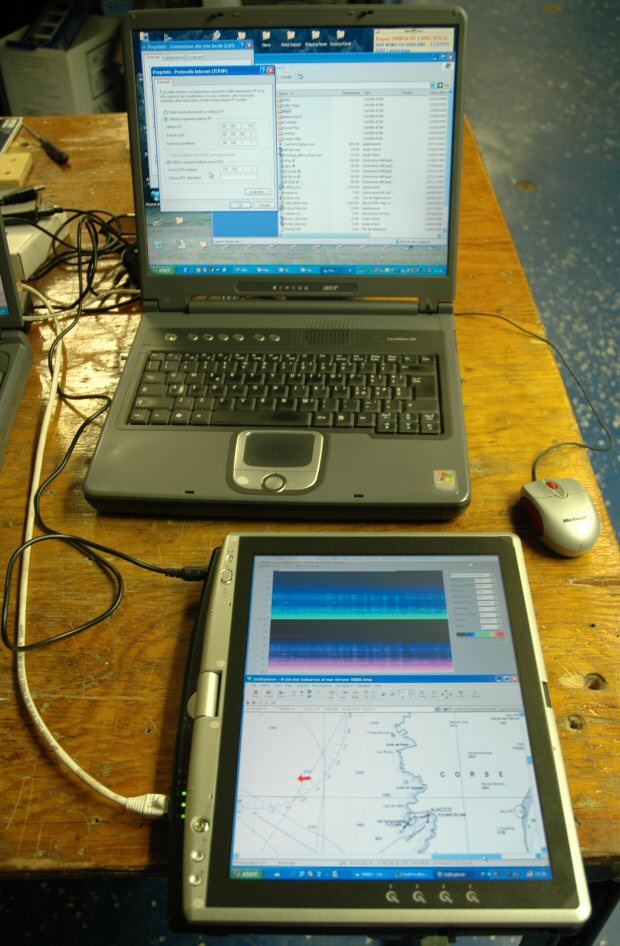
The SeaPro software supports many screen configurations, including rotated displays like those available in Tablet PCs. GPS information and audio data can be distributed through network connections, either wired or wireless.
PDA Recorder


The PocketPC recording set assembled at CIBRA is based on the excellent hardware (PDAudio CF for digital I/O and Mic2496 preamplifier & AD converter) developed by Core-Sound and the software Live2496 developed by Gidluck Mastering. The Mic2496 has been put in a new case to host XLR connectors and two 9V batteries. The microphone interface box and the PocketPc can be velcroed together for easier use in the field; they are connected by an optical cable. The system allows to record up to 192k sampling rate on CF memories like those used in digital cameras. A small solar panel allows to charge PocketPC batteries in the field.
Another option allows to record digital data
coming from the Mic2496 to a M-Audio MicroTrack 2496, a
pocket CF recorder with both analog and digital inputs.
This system is now replaced by pocket-sized
solid-state recorders.
Multichannel Recorder and Beamformer
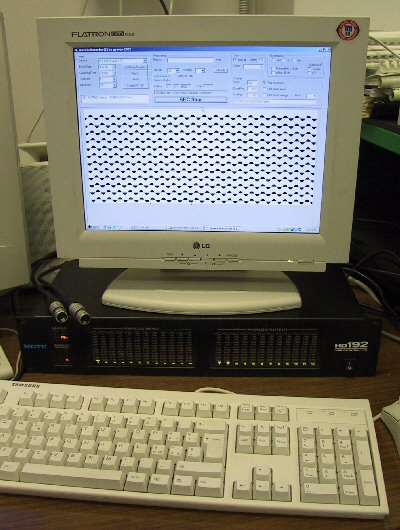
The multichannel recorder based on the MOTU HD192 FireWire interface (12 channels, 192 kHz sampling)
The multichannel recorder has been
developed to allow recording and processing multiple
transducers at once. The basic version allows to record up
to 24 channels with sampling rates up to 192 kHz and bit
depth of 16, 20 or 24 bits. Supported .wav file formats
are 16 bits, 32 bits integer and Float. If a suitable
array of sensors is available, either microphones or
hydrophones, a real-time beamformer display shows the
direction of incoming sounds in real-time, without
appreciable delay.
The software requires a true multichannel board with
multichannel driver (some multichannel boards have drivers
able to manage channels in pairs, not all together).
A special version has been developed for the INFN ONDE Project to read and get synched two stereo digital streams coming from the deep hydrophones located 25 km off the port of Catania. Special software is being developed to allow automatic triggering and bearing measures on relevant events.
Towed array of hydrophones
It is well known that the most critical link in gathering acoustic data is the sensor itself. When we developed the first truly portable real-time DSPW (in 1990) it emerged the need for improved sensors, in particular for underwater bioacoustics, the study of marine mammals and, more recently, for the implementation of mitigation policies.
After two years spent experimenting with variopus hydrophone systems, a towed "dipole" array of hydrophones was was designed in cooperation with Alenia Elsag Sistemi Navali and built by Alenia and USEA to meet specific requirements of our research, such as reliability associated with a high acoustic quality.
The designed array is easy to deploy, and
can be operated from non specifically equipped vessels as
it does not require a winch. The array works well either
on small vessels, thus making it possible to work with
small budgets, or on large oceanographic ships.
The towed array consists in an oil-filled hose which is 12
meters long, 6 cm in diameter, and holds two groups
(mini-arrays) of acoustic transducers, their
preamplifiers, and a pressure transducer. The towing cable
is 150 meters long. The two mini-arrays, made of three
acceleration cancelling transducers each, are positioned 8
meters from each other. Flat frequency response to more
than 40 kHz and low self-noise are the two key-features of
the array.
The mini-arrays can be operated with the three transducers
in parallel, in order to achieve a directional reception
and to attenuate longitudinal noise, or by selecting only
the central transducer of each array to get
omnidirectional sensitivity.
A custom electronic controlling unit was designed to
provide power to the array and to amplify and filter the
received signals. A depth-meter, connected to the pressure
transducer in the array, displays the operating depth in
real-time (at 4-5 knots the average depth is 22-24 meters)
so that it is possible to evaluate the timing of surface
reflected echoes. The whole instrumentation, that
initially included a portable PC-based DSP Workstation and
two DAT recorders, was powered by batteries and
photovoltaic panels, thus allowing a complete autonomy
from the host vessel power source.
Designed in 1992 it was first deployed in summer 1993 and
since then it has been used every year with very little
maintenance needs.
The towed array and the equipment in the original
setup (1993)
With the latest improvements in the DSPW, the interface to the array has bee redesigned to be smaller in size and with larger bandwidth. The interface electronics now allow more than 80 kHz bandwidth and a digital filter equalizes the response at the resonance frequency of the ceramics (42-45 kHz). The array can be now connected either to a desktop PC or to a laptop to allow continuous recording to hard-disk and real-time spectrographic display. Connected to the current CIBRA PAM DSPW is a powerful tool for both research and mitigation needs.
Even if the ALENIA array is still the core equipment at CIBRA, new towed arrays prototypes have been designed and built by CIBRA and NAUTA to have a backup equipment and to experiment new techniques and new hydrophone configurations to better achieve PAM requirements such as bearing and range estimation.

The towed array of hydrophones developed by CIBRA and ALENIA (Picture courtesy of D.M.Rossi).


The array on the winch of the RV Alliance (SOLMAR Project)


Building and testing equipment is a key activity at CIBRA
Updated August 2006, minor revision
August 2012